Abstract
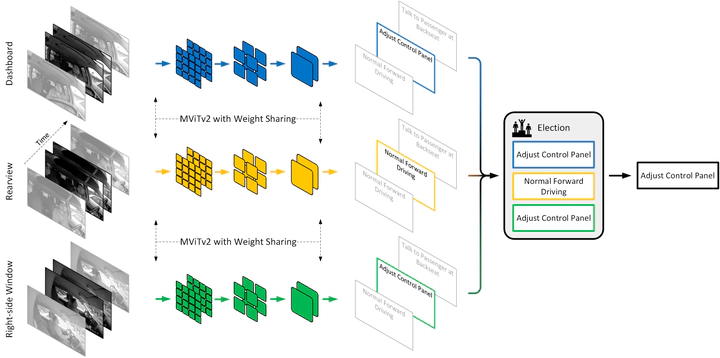
Ensuring traffic safety and preventing accidents is a critical goal in daily driving, where the advancement of computer vision technologies can be leveraged to achieve this goal. In this paper, we present a multi-view, multi-scale framework for naturalistic driving action recognition and localization in untrimmed videos, namely M$^2$DAR, with a particular focus on detecting distracted driving behaviors. Our system features a weight-sharing, multi-scale Transformer-based action recognition network that learns robust hierarchical representations. Furthermore, we propose a new election algorithm consisting of aggregation, filtering, merging, and selection processes to refine the preliminary results from the action recognition module across multiple views. Extensive experiments conducted on the 7th AI City Challenge Track 3 dataset demonstrate the effectiveness of our approach, where we achieved an overlap score of 0.5921 on the A2 test set. Our source code is available at \url{https://github.com/PurdueDigitalTwin/M2DAR}.